
(1)成果簡介
目前,我國金屬礦產資源開發已進入深部開采階段,面臨采礦技術難度大、成本高、環境惡劣、安全風險大等諸多挑戰。智能采礦是破解深部開采發展瓶頸,革新礦產資源開發利用模式,實現礦山綠色、智能、安全、高效高質量轉型發展的必由之路,已成為國際采礦領域研究的熱點和發展的方向。地下金屬礦智能開采關鍵技術攻克了礦山裝備遠程遙控與無人駕駛、井下精確定位導航與高可靠無線通信、多裝備集群管控、生產運營一體化集控與生產實時調度等難題,形成了有軌電機車無人駕駛系統、鑿巖臺車遠程遙控作業系統、鏟運機智能遠程控制系統、固定式液壓破碎錘遠程遙控與智能作業系統、井下無線通信系統、井下“最后一公里”通信與視頻監控系統礦用無線巡檢測試儀、礦山生產實時調度系統、礦山數字化智能化檢測與計量平臺等成套技術。技術成果可廣泛應用于各類礦山企業,能夠大幅提升井下作業裝備協同作業能力和生產效率,減少井下現場作業人員50%以上,改善從業人員工作環境,隔離井下安全風險,有效解決我國深部資源開采過程中所遇到的開采難度大、人力緊缺及安全風險大等難題,提高我國地下金屬礦山安全生產水平和智能開采水平。
(2)主要性能指標及適用條件范圍
適用于地下金屬礦山。主要性能指標如下:有軌電機車無人駕駛系統:延長系統作業時間15%以上(以典型示范礦山為例);支持自動/遠程遙控/本地多模式控制;具備故障診斷功能;獨有信集閉安全邏輯設計,適應各類復雜工況場景。鏟運機智能遠程控制系統:數據可靠傳輸,采用無線雙網冗余設計,平均切換延遲≤20ms;支持自動/遠程遙控/本地多模式控制。井下無線通信系統:支持露天/井下場景;支持快速切換功能,可滿足有軌、無軌等不同場景應用需求,平均切換延遲可達30ms以內;通過礦用安全標志認證。固定式液壓破碎錘遠程遙控與智能作業系統:支持本地/遠程遙控/自主(可擴展)多模式控制;低延遲,遠程遙控系統延時可達150ms之內。井下“最后一公里”通信與視頻監控系統:可實現采區最后1km可靠通信;可實現采區視頻監控;可實現AI視頻智能分析。礦用無線巡檢測試儀:兼容4G、5G、WiFi等多種無線網絡制式;支持在線和離線地圖的分析與展示,在復雜的礦山環境中也能輕松完成規劃和優化網絡布局;便攜式設計,重量≤1kg;工業級寬溫設計,IP68級防護。
(3)成果應用情況
成果獲國家科技進步獎二等獎1項、省部級及社會力量獎9項,授權發明專利17項,在寶武集團、江西銅業、金川集團、山東黃金等多家企業進行了應用,助力相關企業近三年新增產值超百億元,為我國礦山智能化轉型提供核心技術支撐。
(4)成果展示

圖1 鑿巖臺車遠程遙控作業系統

圖2 鏟運機智能遠程控制系統示意圖

圖3 固定式液壓破碎錘遠程遙控系統示意圖
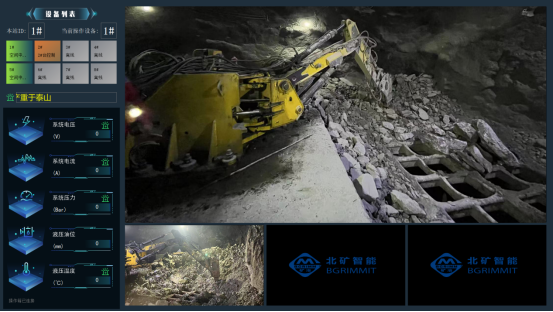
圖4 固定式液壓破碎錘遠程遙控與智能作業系統界面

圖5 有軌電機車無人駕駛系統
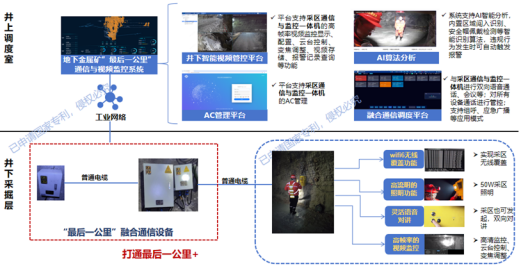
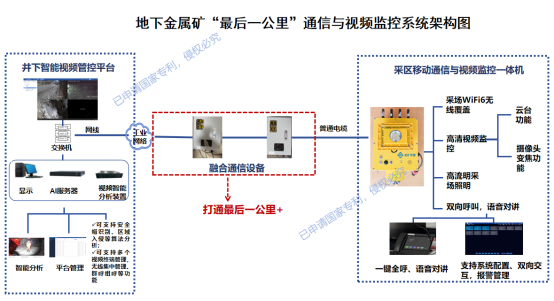
圖6 井下“最后一公里”通信與視頻監控系統